Introdução
A nova Fonte de Luz Síncrotron em construção no LNLS terá 518 metros de circunferência e permitirá a instalação de até 40 linhas de luz. Ao longo desses 518 metros serão instalados 1200 magnetos responsáveis por manter os elétrons na trajetória correta. Vários desses magnetos são pré-montados em berços que são instalados sobre pedestais de concreto. O alinhamento entre berços adjacentes deve ser feito com precisão melhor que 100 micrometros e os mecanismos de precisão que realizam esse alinhamento exigem que os pedestais de concreto sejam alinhados com precisão da ordem de 3mm. Cada pedestal pesa cerca de 6 toneladas e é fundamental que a marcação no piso para instalação desses pedestais seja muito bem feita para se evitar qualquer possibilidade de retrabalho.
O objetivo principal é desenvolver um dispositivo capaz de fazer marcas no piso para serem usadas como referência de instalação de equipamentos. Esse dispositivo deve ser baseado em uma plataforma robótica padrão, deve ser capaz de se localizar usando um Laser Tracker, deve atingir uma precisão de posicionamento da ordem de 1 mm e marcar os pontos a partir de um banco de dados.
O maior trabalho desse desafio se refere ao desenvolvimento de um dispositivo para fazer as marcas de precisão no piso, no sistema de comunicação entre o robô e o computador e no software de controle. Consideramos o uso da plataforma robótica NEXUS 10008 uma alternativa interessante.
Parâmetros Técnicos
- Operação sem fio
- Posicionamento por Laser Tracker
- Precisão de +/- 1 mm no ponto marcado
- Capacidade de identificação do ponto marcado
- Funcionamento seguro
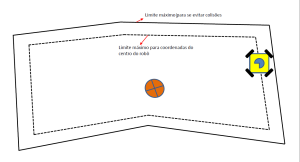
- Operação à distância de até 30 m da base (Laser Tracker e Computador)
- Código aberto
Outras considerações
- Interrupção do movimento em caso de perda do sinal do LT.
- Interrupção do movimento em caso de grande discrepância entre a leitura do LT e a leitura dos encoders das rodas.
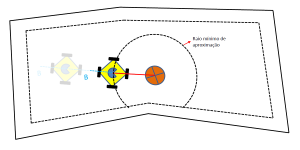
- Possibilidade de marcação extra em torno do ponto central, compatível com marcação múltipla e ou marcação de pontos próximos.
- Possível dispositivo de limpeza do local antes da marcação, como por exemplo um jato de ar.
- Rotina de teste. Talvez seja útil ter uma rotina pronta para marcar um pequeno quadrado de 100mm x 100mm para ter certeza de que todos os eixos estão funcionando corretamente.
- Flexibilidade de programação
- Ao término da marcação dos pontos listados, devemos ter a opção de repetir toda a operação.
Aplicações no LNLS
Instalação de suportes dos aceleradores, linhas de luz, cabanas de proteção radiológica e equipamentos industriais em geral.
Levantamento topográfico do piso do acelerador e do hall experimental.
Aplicações fora do LNLS
Sinalização de solo, ciclovias, campos de futebol e quadras esportivas. Levantamento topográfico de pisos industriais, ruas, estacionamentos, etc.
Demanda
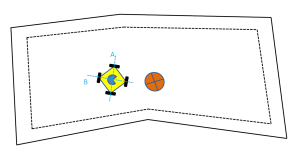
Uma unidade do equipamento. Desenvolvimento de hardware e software de um (1) pequeno robô alimentado por bateria e comunicação sem fio, comandado por um computador externo, capaz de se orientar a partir das coordenadas fornecidas por um Laser Tracker, capaz de marcar pontos no piso com precisão da ordem de 1 mm para instalação de equipamentos ao longo do túnel do acelerador.
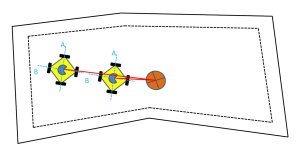
Algoritmo básico de funcionamento
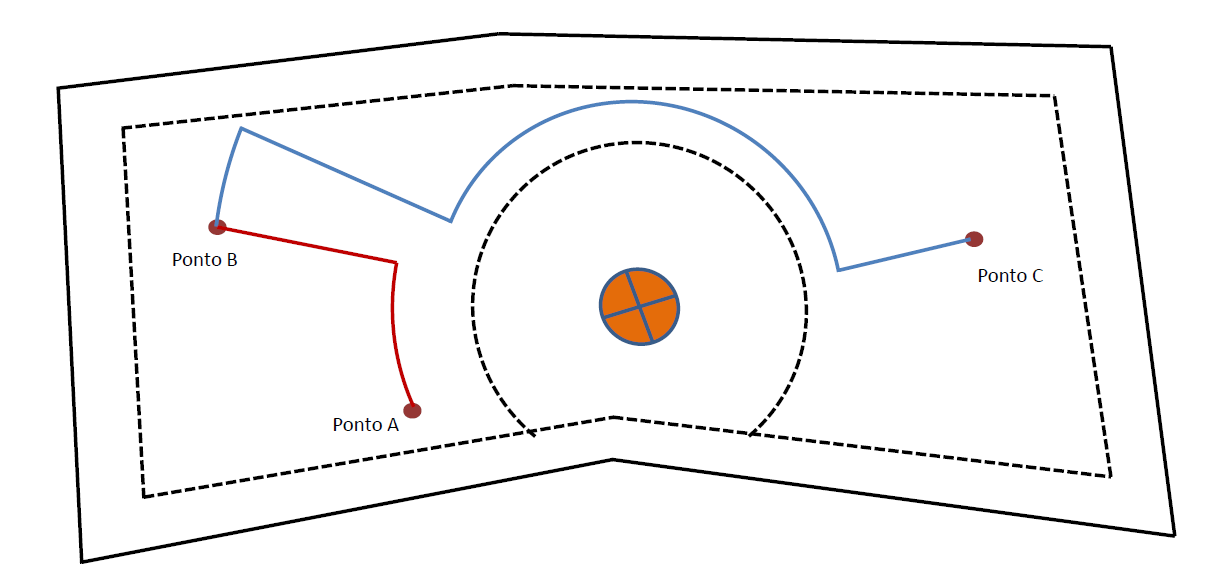
Para a tarefa principal de marcar um conjunto de pontos existentes em um arquivo, estamos considerando a seguinte sequência de operação:
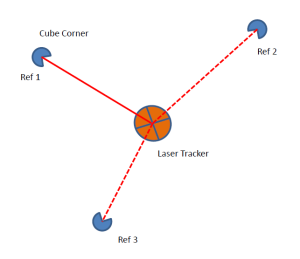
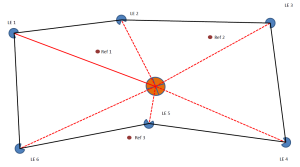
- Posicionamento do Laser Tracker: Utilização de 1, 2 ou 3 pontos de referência para localização do Laser Tracker no sistema de coordenadas do local.